The ApeWorm world (or dual worlds) does not need to be defined explicitly. The upper and lower limits for the ApeWorm coordinates will suffice. As shown in Figure 1, the allowable coordinates run from 0 to 4 on both axes.
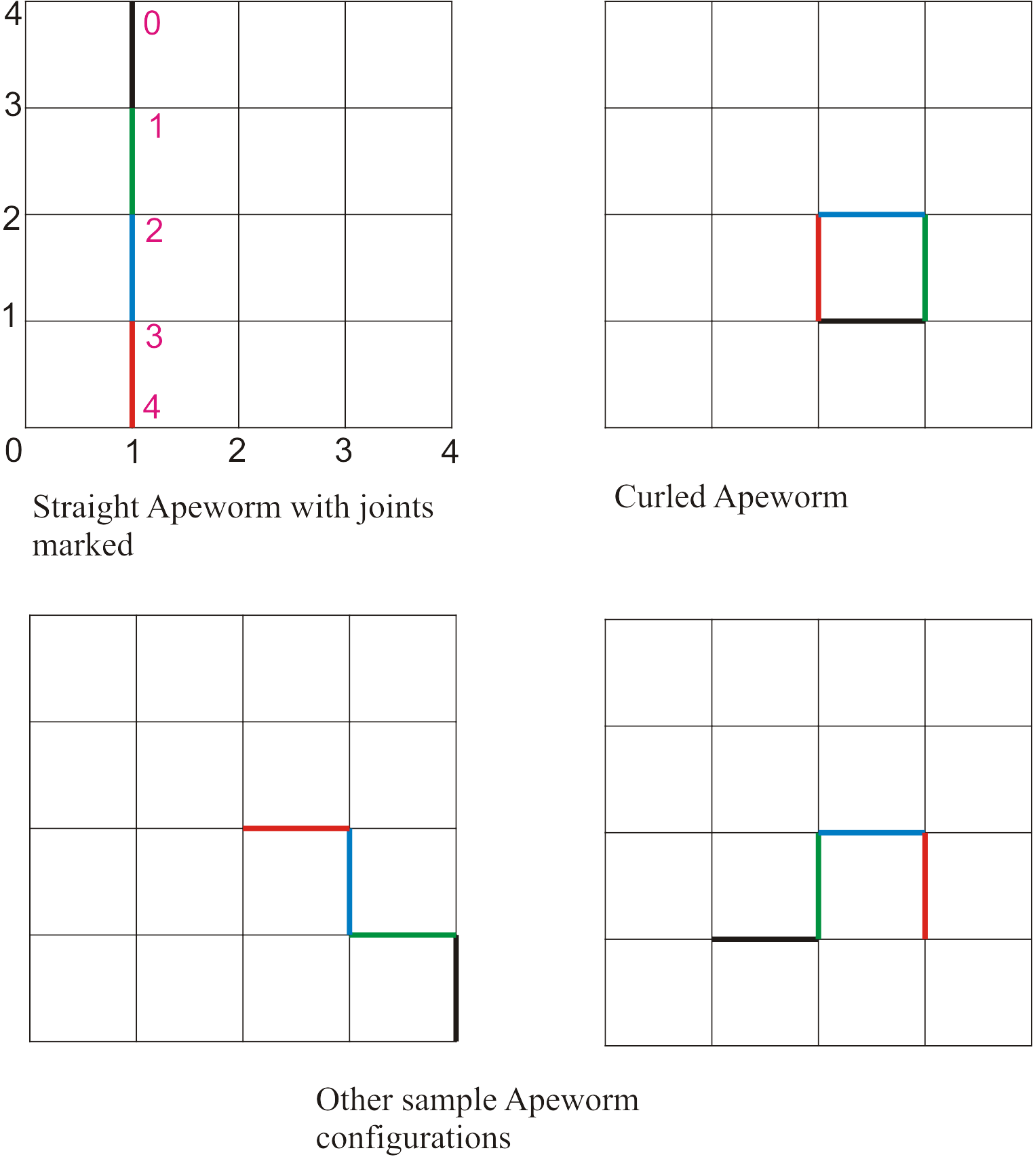
Figure 1
ApeWorms themselves have 4 segments, but require five coordinate points to describe fully. Each point has an x1 component and an x2 component. The points will be called A0(x1,x2), A1(x1,x2) , A2(x1,x2) , A3(x1,x2) , and A4(x1,x2).
The data we gods will use to track ApeWorms are not the same data that they keep track of themselves. An ApeWorm will know where its head, or segment one, is on the world grid. In other words, it will know A0(x1,x2) and A1(x1,x2). Each intersegment node (joint) will be able to convey to the control system one of three states: left, center, or right (L, C, R). Handedness will be determined from the higher numbered segment. In other words for the 1 joint, we look towards the 1 segment from the 2 segment. Thus in the curled ApeWorm example in Figure 1 the joints are all in the right or R configuration.
The joints are controlled by sets of two opposing virtual muscles. When there is no signal to a muscle, it is relaxed, and it contracts as signals increase. An algorithm will determine which of the three states the joint is in based on the relative strengths of the control signals to the muscles.
The ApeWorm's ability to "view" another ApeWorm is stereoscopic but otherwise simple. The virtual retinas coincide with the x1 and x2 axes. Each segment of these axes can only "see" a segment in its row or column, and if there are two segments in a column can only see the closest one. [But a second segment in a column might be inferred by the control system.] The sensor can see the segment number, if any, and can see the distance, or what cross-coordinate the segment lies on. Thus in the upper-left example in Figure 1, the sensors on the x1 (horizontal) axis will record nothing. The x2 sensor closest to the origin will record a segment 4 that is at x1 = 1. The x2 sensor between 1 and 2 will record a segment 3 also at x1 = 2, etc.
Next: ApeWorm Brain Overview (to be constructed)
